

一、社团简介
机器人科技创业研究社是依托于智能机器人创新实验室的学生专业实践及科技创业社团。负责智能机器人创新实验室的日常管理及运行。实验室创建与2011年,实验室可使用面积250平米,设备资产总计200余万元。机器人科技创业研究社成了于2014年,先后申请了国家大学生创新创业项目6项,结项2项,在研4项。智能机器人创新实验室承担理工学院各类学科竞赛。本实验室积极鼓励并组织学生参加各类全国性的竞赛活动和赛前培训,如大学生电子设计竞赛、、挑战杯竞赛、机器人竞赛、、互联网+竞赛。通过这些活动,提高学生的实践能力,践行学校的办学思想和办学理念。社团主要功能为创新实践教学,服务各类学科竞赛。
社团现开展的项目包括:1、水下搜救机器人设计研究;2、航拍飞行器设计与市场拓展;3、自主式AUV设计与实现;4、搭载氦气球的超续航无人机设计;5、无人环境监测船;6、基于Kinect的3D照片打印;7、智能扫地机器人;8、Arduino开源项目;9、自主视觉机器鱼;10、复合式ARV水下机器人。
参加机器人科技创业研究社可以收获什么?
1、社团会定期发布学科竞赛等专业实践项目,通过项目培训可以锻炼专业能力。
2、通过参与完成项目可以置换课程设计和专业实习等。
3、参加社团可以加综测学分,在各类竞赛中获奖可以提高基点。
4、实验室提供勤工助学岗位,参加勤工助学岗位可以优先参与项目学习赚钱两不误。
二、社团招新
机器人科技创业研究社自2014年起每学期招新一次,现有成员174人,包括了理工学院和智能信息科技学院各专业各年纪的学生。
三、培训课程
(一) mega16单片机实训基于竞赛实训机器人平台
1、课程基本信息
|
学时 |
48 |
理论学时 |
16 |
实验学时 |
32 |
|
适用专业 |
电子、通信、测控、车辆、计科 |
||||
|
先修课程 |
《C语言程序设计》 《电路分析基础》 |
||||
|
后续课程 |
学科竞赛等实践项目 |
||||
|
选用教材 |
自编讲义及AVR竞赛实训机器人平台 |
||||
|
主要教学 参考书 |
《AVR单片机原理及测控工程应用》 北京航空航天大学出版社 《单片机编程魔法师之高级裸编程思想》 电子工业出版社 《AVR单片机实用C语言程序设计与典型实例》 《机器人学基础》 机械工业出版社 |
||||
|
推荐阅读书目、工具书 |
《ATmega16中文数据手册》 《AVR Studio中文说明书》 |
||||
2、学时分配表
|
课序 |
内 容 |
学时 |
|
|
理论课时 |
实验课时 |
||
|
1 |
认识机器人各类型机器人例举及结构分析 |
1 |
2 |
|
2 |
搭建机器人的大脑-单片机系统及硬件概述 |
1 |
2 |
|
3 |
赋予机器人思想-单片机C程序开发及相关规范 |
1 |
2 |
|
4 |
人机交互之LCD液晶显示 |
1 |
2 |
|
5 |
聪明的脑袋中断机制与外部中断 |
1 |
2 |
|
6 |
1 |
2 |
|
|
7 |
机器人距离感知利用定时器超声测距 |
1 |
2 |
|
8 |
机器人执行器之直流电机运动控制及PWM调速 |
1 |
2 |
|
9 |
机器人执行器之舵机运动关节控制 |
1 |
2 |
|
10 |
机器人闭环控制计数器测速及调速 |
1 |
2 |
|
11 |
机器人通信之UART串口功能调试 |
1 |
2 |
|
12 |
机器人通信之单总线DS18B20温度测量 |
1 |
2 |
|
13 |
机器人通信之I2CADXL345姿态感应 |
1 |
2 |
|
14 |
机器人综合项目-红外遥控小车设计 |
1 |
2 |
|
15 |
机器人综合项目-巡迹小车设计 |
1 |
2 |
|
16 |
机器人综合项目-网络及语 音模块扩展 |
1 |
2 |
|
总 计 |
48 |
||
3、培训平台介绍
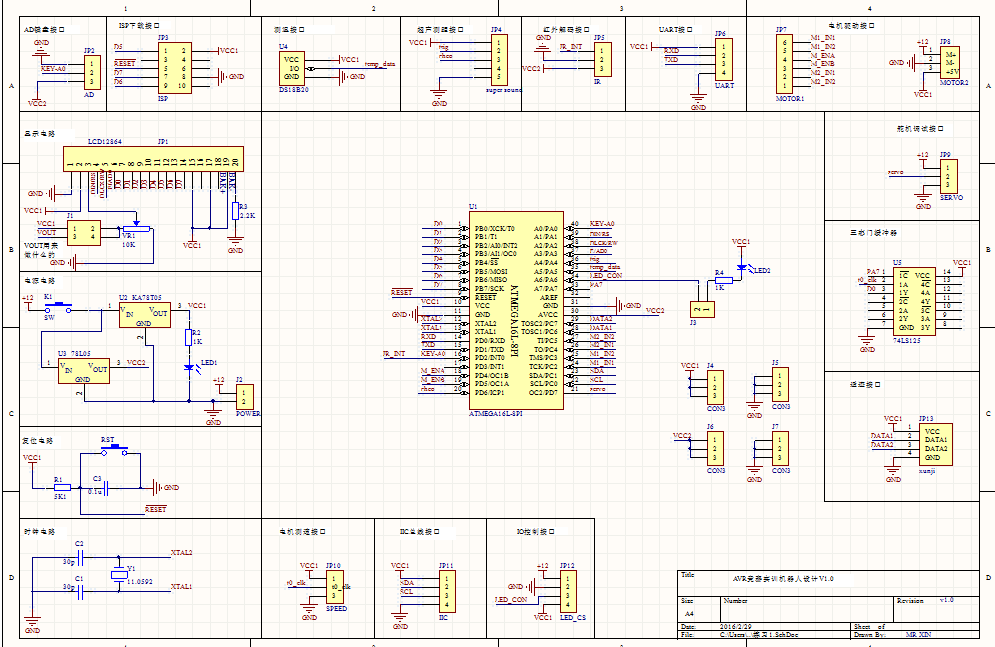
实验平台原理图
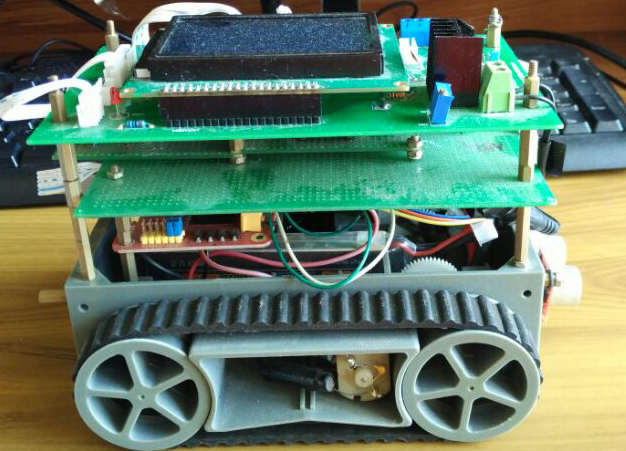
课程最终作品具备超声测距、红外遥控、巡迹、测温、姿态感应、wifi通信、舵机控制等综合功能的竞赛实训机器人
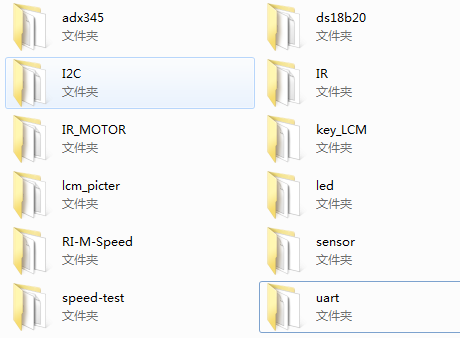
软件资源本课程对应的12个项目的程序:
5、培训图片

(二)SolidWorks培训
1、课程信息
课程基本信息
|
学时 |
32 |
理论学时 |
16 |
实验学时 |
16 |
|
开课学院 |
理工学院 |
||||
|
适用专业 |
通信工程、电子与信息工程、海洋通信 |
||||
|
先修课程 |
计算机基础 |
||||
|
后续课程 |
|
||||
|
选用教材 |
《solidworks项目教程》、鲍仲辅、机械工业出版社、2015年 |
||||
|
主要教学 参考书 |
《solidworks零件与装配体》、胡其登、机械工业出版社、2015 |
||||
|
推荐阅读书目、工具书 |
1.凯思达人才培训有限公司solidworks综合班内部讲义 2.Solidworks软件自带指导教程 |
||||
2、学时分配表
|
章序 |
内 容 |
学时 |
|
|
理论课时 |
实验课时 |
||
|
1 |
solidworks软件入门 1、绘制电路原理图 2、电路仿真 3、元器件绘制及元器件库管理 4、电路原理图绘制的优化方法 5、元器件封装及PCB图设计 6、PCB实验室设计加工 |
2 |
2 |
|
2 |
草图绘制 1、元器件绘制及元器件库管理 2、电路原理图绘制的优化方法 3、元器件封装及PCB图设计 4、PCB实验室设计加工
|
2 |
2 |
|
3 |
基本零件建模 1、元器件绘制及元器件库管理 2、电路原理图绘制的优化方法 3、元器件封装及PCB图设计 4、PCB实验室设计加工
|
2 |
2 |
|
4 |
装配体 1、电路原理图绘制的优化方法 2、元器件封装及PCB图设计 3、PCB实验室设计加工
|
2 |
2 |
|
5 |
工程图 1、元器件封装及PCB图设计 2、PCB实验室设计加工
|
2 |
2 |
|
6 |
铸件和锻件建模 |
2 |
2 |
|
7 |
高级装配体与爆炸视图 |
2 |
2 |
|
8 |
大作业考核及项目测评 |
2 |
2 |
|
|
|||
(一)潜水视察级水下机器人
1、项目简介
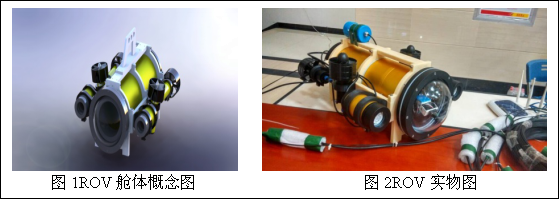
本项目设计制作适用于近海及湖泊100米以下水域探测的ROV水下机器人。流线型的设计使ROV机器人在水下作业时,既可以通过脐带缆供电源也可以通过蓄电池工作,连接光纤经岸上的无线路由器设备,将图像以及温度等水下状况传输至手持设备,以代替人工下水作业,大大减少了水下探测的危险性。结合我国目前的海洋战略,本ROV价格低廉,更适用于民用水下探测与作业。并且通过手持安卓设备在水上对ROV进行操作,方便简洁。
项目图片:
2、项目创新点
本项目自主设计了ROV的舱体、ROV的推进器。水下控制模块与电源模块。本项目云台设备由图纸项目经3D打印机打印拼接完成。采用脐带缆纹盘实现水下与岸上的通行传输。采用手持设备(手机、平板)对ROV进行控制。
研究的内容:
本设计制定了ROV总体功能和指标,据此确定传感器和监控设备的性能指标,及其工作环境,对设备进行了选型和配置,并制作了ROV的样机。并对水下机器人的形体选择、耐压壳体方案选择、密封、动力系统和控制系统的电路硬件、观测和照明系统、位姿采集系统及手机APP地面站操控系统和光电脐带缆的设计、制造及其测试工作。
重点提出了对耐压舱体、透明罩、水下推进器和云台的详细机械设计方案及其软件操控方案。用理论计算方式和Solidworks静应力分析相互结合相互补充的方式对耐压舱体、透明罩等ROV关键部件的强度校核与稳定性分析,并且通过实际压力测试证明了分析计算的正确性与设计的可靠性。本文建立了简单的ROV运动学与动力学数学模型,对ROV进行了动力学控制技术研究。
3、ROV总体方案
在ROV设计阶段,首先要明确ROV的设计目的、ROV执行的任务和ROV的工作环境,参照国外已有成熟ROV资料,然后再根据各个部分的具体要求,以将ROV各主要部分模块化再进行具体设计。设计过程中要注意各模块之间的相互耦合部分,做到各模块间减少耦合,以最简单的方式使各模块协调有机的连为一体。为了保证ROV的总体性能和指标,总体组装布置时,需要注意以下几个方面:
① 布置要紧凑,充分利用ROV有限的空间但是要避免相互的干扰而且要兼顾各种设备是否便于操作;
② 尽量使各个设备和仪器发挥出最大能力以保证ROV可以达到规定的各项指标;
③ 预留备用空间,以便以后系统升级或者增加其他设备完成其他任务;
④ 操作简单、存放方便和维修简易;
⑤ 安全可靠。
设计目标:设计一个浅水级无人有缆监控水下机器人(简称ROV),能通过控制台的控制,利用摄像机等设备来完成水下生物、珊瑚礁、堤坝和管道等的观察任务,并且在需要时可以记录水下视频。
ROV的工作方式:通过一个带有深度传感器、温度传感器和摄像机的ROV下潜到要求的深度,利用摄像机寻找到要求的工作地点,用摄像机把水下图像信息回传给水面控制台,并通过回传的图像及数据信息作为反馈远程操纵ROV,来寻找到水下观察的目标。
4、主要技术指标:
(1)水平航行速度:本项目ROV 工作在浅水水域,根据在使用过程中的实际需求,设计航行速度为 1至2 节。
(2)工作深度和极限深度:根据实际使用环境要求设计 ROV 的工作深度和最大下潜深度(又称作极限深度)。工作深度是指 ROV 在正常使用过程中所能到达的最大深度,在工作深度内,ROV 的下潜次数不受限制,长期停留不会引起耐压壳体产生永久变形,而且任何密封部分都不会出现任何
CONTENT END


