

环境感知是智能驾驶安全行驶的前提,也是整个系统中至关重要的一环,直接决定无人驾驶车辆的决策和规划的智能化水平。环境感知技术模块通过处理各类车载传感器输出的感知信息来获取智能汽车自身的状态信息、周围交通参与物的状态信息、交通环境信息等,为智能汽车的路径规划及驾驶行为决策提供必要的数据支持。因此,智能汽车环境感知系统成为研究热点。
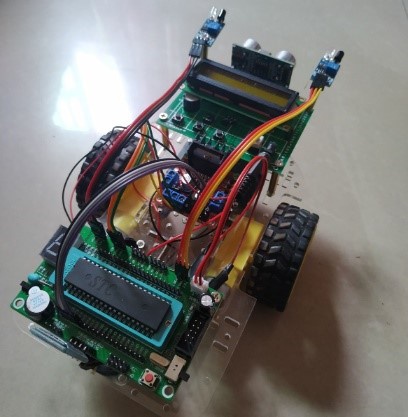
项目设计使用红外线来检测前方车辆、行人或者障碍物,以达到对环境的感知,识别周围环境中静止和运动的物体,可以在遇到障碍物后驱动智能小车按照设定的路径运行。测试结果表明,智能小车系统可以稳定地检测环境并采取适当的措施。通过实现汽车环境感知系统的功能,为车辆的控制器和执行器提供全方面的环境信息,确保车辆安全行驶。
系统基于红外传感器,以检测、决策、控制前方物体或状态,并对其进行多次测试,在不同的环境中都能良好运行,实现红外避障功能。同时利用超声波和温度传感器融合的前方测距和温度检测系统,实现了超声波测距,并在对超声波测距时做了温度补偿,实时测温。智能车辆对环境的感知正从单一传感器感知周围车辆和障碍物位置、运动状态逐渐到多传感器融合感知,使车辆拥有更加智能、适应性强、全方面的环境感知系统。
CONTENT END


